Электроника управления двигателем определяет, насколько плавно робот-гуманоид может ходить, поворачиваться, захватывать предметы и сохранять равновесие.Каждый сустав зависит от драйверов двигателей, датчиков обратной связи, контроллеров, коммуникационных микросхем и схем управления питанием, которые регулируют крутящий момент, скорость, положение и реакцию системы.В этом руководстве рассматриваются типы микросхем, используемые в двигательных системах гуманоидных роботов, и способы их выбора для различных задач управления.
Каталог
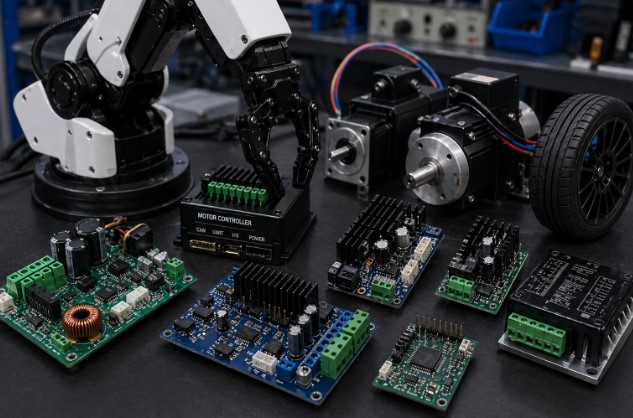
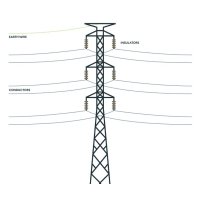
Рисунок 1. Электроника управления двигателем роботов-гуманоидов.
Электроника управления двигателем роботов-гуманоидов преобразует управляющие сигналы в точное физическое движение и служит основой движения робота.Они регулируют положение, скорость и крутящий момент двигателя, поэтому каждый сустав движется точно и плавно.Используя обратную связь с обратной связью от датчиков, таких как энкодеры, система постоянно сравнивает предполагаемое и фактическое движение, внося поправки в реальном времени для повышения точности.
В роботах-гуманоидах контроль движений особенно важен, поскольку баланс и координация должны поддерживаться одновременно во многих суставах, особенно во время таких действий, как ходьба и обращение с предметами.Эта электроника также управляет питанием и включает функции защиты для предотвращения перегрева и электрических повреждений, обеспечивая безопасную, надежную и эффективную работу.
ИС драйвера двигателя управляют запуском, остановкой, изменением направления, а также управлением скоростью и крутящим моментом двигателей.За счет интеграции элементов переключения питания, логики управления и функций защиты в компактное устройство эти микросхемы повышают эффективность, уменьшают сложность схемы и поддерживают надежное движение суставов.
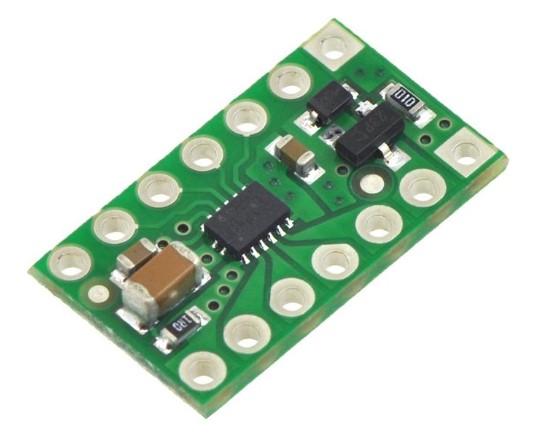
Рисунок 2. Texas Instruments DRV8835
Техасские инструменты DRV8835
DRV8835 компании Texas Instruments подходит для управления небольшими коллекторными двигателями постоянного тока в компактных роботизированных соединениях.Он включает в себя два драйвера H-моста, позволяющие управлять двумя двигателями постоянного тока или одним шаговым двигателем с помощью одной микросхемы.Это делает его полезным для легких соединений, небольших приводов, захватов и механизмов мобильных роботов.
• Драйвер двигателя с двойным H-мостом
• Поддержка коллекторных двигателей постоянного тока и небольших шаговых двигателей.
• Диапазон питания двигателя от 2 В до 11 В.
• Пиковый выходной ток до 1,5 А на канал
• ШИМ и интерфейс управления фазой/включением.
• Встроенная защита от перегрузки по току и перегрева.
• Компактная упаковка для конструкций с ограниченным пространством
При управлении двигателем гуманоидного робота DRV8835 полезен, когда конструкция требует небольшого, эффективного и простого в интеграции драйвера для низковольтных двигателей.Его двухканальная структура также помогает уменьшить пространство на плате при использовании нескольких небольших двигателей.
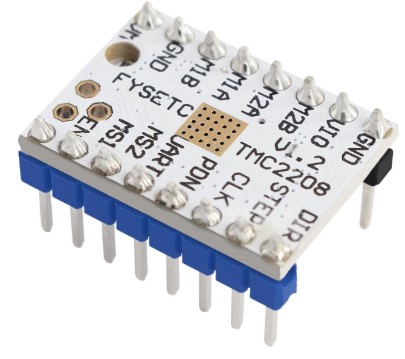
Рисунок 3. Тринамик TMC2208
Тринамик TMC2208
Trinamic TMC2208 предназначен для точного управления движением там, где требуется плавная и тихая работа.Он широко используется в роботизированных соединениях, требующих точного позиционирования и снижения вибрации, что делает его пригодным для рук, пальцев и систем точного движения.
• Драйвер шагового двигателя для биполярных двигателей.
• Диапазон рабочего напряжения от 4,75 В до 36 В.
• До 1,2 А среднеквадратичного значения (≈2,0 А пикового значения при охлаждении)
• Интерфейс управления Step/Dir и UART
• Поддержка микрошагов (интерполяция до 256)
• StealthChop для тихого и плавного движения.
• Защита от перегрева, короткого замыкания и перегрузки по току.
• Регулируемый контроль тока для оптимизации производительности.
В роботах-гуманоидах TMC2208 полезен для приложений, требующих плавного, точного и бесшумного движения.Это помогает улучшить качество движения, одновременно снижая вибрацию и механическое напряжение.
Обратная связь при движении позволяет роботу-гуманоиду сохранять равновесие, контролировать свое положение и плавно двигаться.
Система построена на трёх основных частях:
• Приводы – двигатели, которые создают движение в суставах (например, плечах, коленях и пальцах).
• Контроллеры – обычно микроконтроллеры, которые решают, как должны двигаться двигатели.
• Датчики – устройства, которые обеспечивают обратную связь в режиме реального времени, чтобы робот мог корректировать свои действия.
Это важно при ходьбе, поворотах и манипуляциях с объектами, где небольшие ошибки могут повлиять на устойчивость.
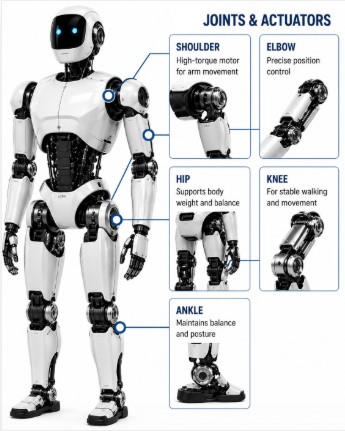
Рисунок 4. ИС для контроля баланса и положения.
ИС обратной связи по движению являются частью сенсорной системы и предоставляют данные о движении, наклоне и вращении.Эта информация помогает роботу сохранять осанку и корректировать свое движение.ADXL345 — это 3-осевой акселерометр, измеряющий движение в трех направлениях.Он поддерживает диапазон от ±2 г до ±16 г и может обнаруживать небольшие изменения в движении.Он использует низкую мощность, поэтому может работать непрерывно.Он используется для мониторинга положения, обнаружения наклона и отслеживания устойчивого движения.Однако он не измеряет вращение, поэтому не может полностью определить ориентацию самостоятельно.
STMicroelectronics LSM6DSOX сочетает в себе акселерометр и гироскоп, что позволяет измерять как движение, так и вращение.Это дает более четкое представление о положении и ориентации робота.Он поддерживает высокие скорости передачи данных для быстрого обновления и включает в себя буфер данных для проведения непрерывных измерений.Эти функции делают его подходящим для контроля баланса, скоординированных движений и быстрой регулировки.
В приложениях ADXL345 используется для точного определения ускорения и положения, а LSM6DSOX обеспечивает полное отслеживание движения.Вместе они обеспечивают стабильное и точное движение роботов-гуманоидов.
Особенность
|
ADXL345
|
LSM6DSOX
|
Тип датчика
|
Акселерометр
|
ИДУ
|
Обнаружение движения
|
Линейное движение
|
Движение + вращение
|
Потребляемая мощность
|
Низкий
|
Умеренный
|
Вариант использования
|
Базовое определение позы
|
Полное отслеживание баланса
|
Контроллеры MCU и DSP важны для роботов-гуманоидов, поскольку они обеспечивают быструю, точную и стабильную реакцию двигателей во время движения.Такие функции, как ШИМ, АЦП, контроль времени и точная обработка, напрямую влияют на качество движения, баланс и координацию.Без этих возможностей движения становятся нестабильными, замедленными и менее точными.

Рисунок 5. Контроллеры MCU и DSP
Широтно-импульсная модуляция (ШИМ) важна, поскольку она позволяет точно контролировать скорость и крутящий момент двигателя путем регулирования рабочих циклов сигнала.Микрочип
MCP23017
 MCP23017
Micrel / Microchip Technology
922
In Stock: 24200 pcs
MCP23017
Micrel / Microchip Technology
922
In Stock: 24200 pcs
поддерживает расширение управления с помощью 16-битный настраиваемый интерфейс GPIO, I²Cи возможность прерывания при изменении, работающий от от 1,8 В до 5,5 В.Эти функции помогают управлять несколькими сигналами управления в сложных двигательных системах.
Аналого-цифровое преобразование (АЦП) необходимо для перевода сигналов датчиков в цифровые данные для принятия решений по управлению.Analog Devices AD7606 обеспечивает 8 одновременных каналов дискретизации, 16-битное разрешение и до Частота дискретизации 200 kSPS.Он также включает в себя интегрированный аналоговый интерфейс, передискретизацияи встроенное масштабирование ввода, что позволяет точно и синхронно измерять ток двигателя, его положение и обратную связь с системой.
Управление по времени обеспечивает работу контуров управления с постоянными интервалами с использованием аппаратных таймеров и прерываний, что необходимо для стабильной и синхронизированной работы двигателя.Реакция в режиме реального времени позволяет немедленно адаптироваться к изменениям в движении или внешних силах.Вместе эти функции обеспечивают плавное, точное и надежное управление двигателями роботов-гуманоидов.
Рис. 6. Коммуникационные микросхемы для распределенных автомобильных сетей.
В роботах-гуманоидах и других многоосных системах коммуникационные микросхемы используются для связи контроллеров двигателей, драйверов и датчиков в различных суставах.Вместо того, чтобы прокладывать отдельные провода для каждого сигнала, эти системы полагаются на общие линии связи для соединения нескольких узлов.Это уменьшает объем проводов и обеспечивает скоординированное управление всеми двигателями.
Texas Instruments
SN65HVD251
SN65HVD251
TI
648
In Stock: 18937 pcs
обычно используется в сетях двигателей на основе связи CAN.В робототехнических системах он обычно размещается между микроконтроллером и коммуникационной шиной в каждом объединенном модуле.Это позволяет нескольким контроллерам двигателей обмениваться командами и обратной связью в режиме реального времени.Его дифференциальная сигнализация помогает поддерживать стабильную связь даже при электрических помехах от двигателей, а встроенная защита повышает надежность при сбоях или перегреве.Это делает его хорошо подходящим для синхронного управления движениями роботизированных конечностей.
Другой широко используемый вариант —
MAX485
MAX485
IM
IC DIPSOP
In Stock: 15600 pcs
, часто встречающийся в системах управления двигателями, использующих сети
rs-485
rs-485
ATI
08+
In Stock: 80424 pcs
.Обычно он используется в модулях исполнительных механизмов или распределенных панелях управления, где требуются более длинные кабели, например, в более крупных роботах или промышленных роботизированных манипуляторах.Его способность поддерживать связь на больших расстояниях и противостоять шуму делает его полезным для поддержания согласованных сигналов между контроллерами и двигателями.Полудуплексная конструкция также упрощает проводку, что полезно при масштабировании систем со многими узлами.
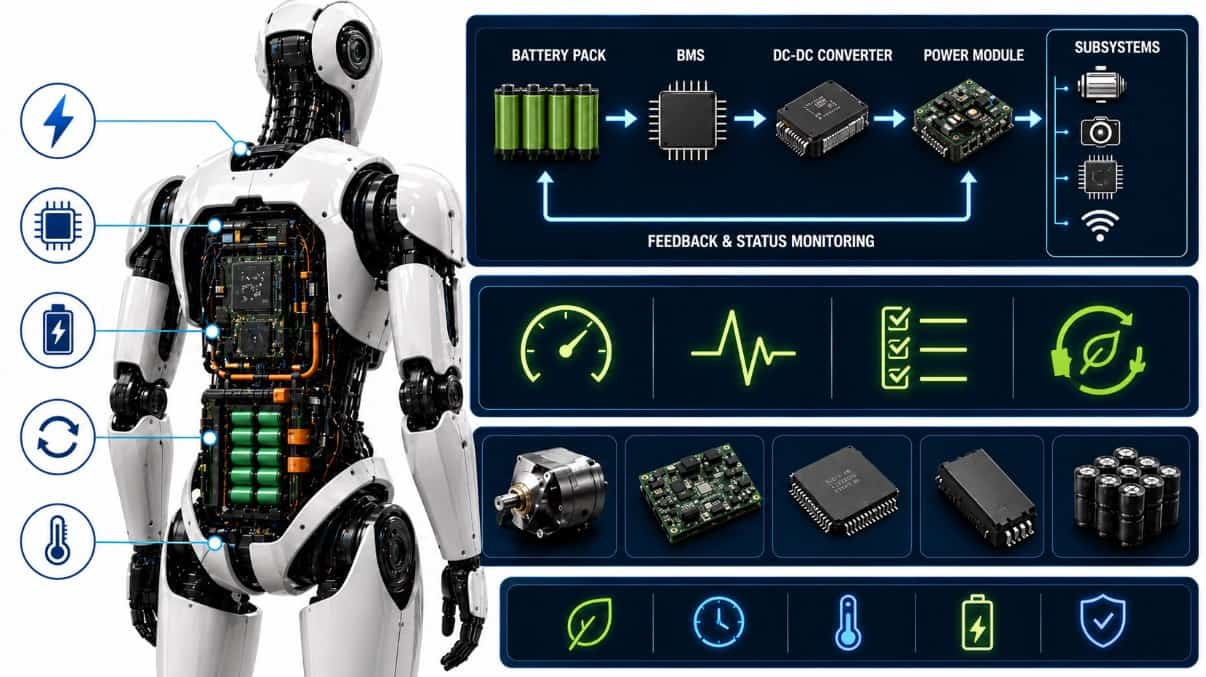
Рис. 7. ИС управления питанием для систем двигателей роботов.
Как управление питанием поддерживает систему? Микросхемы управления питанием помогают поддерживать стабильное напряжение и защищать двигательные системы робота от шума, перегрева и колебаний мощности.В роботах-гуманоидах драйверам двигателей требуются шины питания с более высоким током, а микроконтроллерам, датчикам и коммуникационным микросхемам нужны чистые и стабильные источники низкого напряжения.
Преобразователи постоянного тока в постоянный ток для мощности двигателя
Преобразователи постоянного тока в постоянный ток эффективно снижают напряжение аккумуляторной батареи для плат управления двигателями и распределенных роботизированных модулей.
Texas Instruments
TPS5430
TPS5430
TI
TPS5430 TI SOP-8
In Stock: 119584 pcs
— это широко используемый понижающий преобразователь для роботизированных энергетических систем.
• Диапазон входного напряжения от 5,5 В до 36 В.
• Выходной ток до 3 А
• Частота переключения 500 кГц
• Регулируемое выходное напряжение
• Подходит для силовых шин управления двигателем.
LDO-регуляторы для датчиков и контроллеров
LDO обеспечивают чистое напряжение для маломощных цепей, на которые влияет шум переключения двигателя.
Microchip
MCP1700
MCP1700
Microchip
1141
In Stock: 7827 pcs
представляет собой маломощный LDO, подходящий для датчиков и коммуникационных ИС.
• Диапазон входного напряжения от 2,3 В до 6,0 В.
• Выходной ток 250 мА
• Ток покоя 1,6 мкА
• Работа с низким падением напряжения
• Подходит для цепей измерения и управления.
Защита и распределение мощности
Защитные микросхемы и переключатели нагрузки помогают предотвратить перегрузку по току, перегрев, короткие замыкания и нестабильные условия запуска во время работы двигателя.
Преобразователи постоянного тока, LDO и защитные микросхемы вместе обеспечивают стабильную подачу энергии для систем двигателей роботов.
Выбор микросхем для уровня управления двигателем робота-гуманоида требует согласования требований к управлению и условий эксплуатации с требованиями каждого сустава.Ниже приведены характеристики, которые помогают улучшить стабильность движения, эффективность и общую безопасность системы.
Совместимость типов двигателей
Выберите микросхемы, предназначенные для конкретного двигателя:
• Двигатели постоянного тока → Драйверы H-моста
• Шаговые двигатели → ИС шагового драйвера
• Двигатели BLDC → трехфазные драйверы
Текущий рейтинг
Выбирайте микросхемы, которые поддерживают требования двигателя к постоянному и пиковому току с достаточным запасом для предотвращения перегрузки и обеспечения долговечности при динамических нагрузках.
Диапазон напряжения
Убедитесь, что микросхема работает в пределах диапазона напряжения питания системы и двигателя.Стабильная работа зависит от правильного согласования напряжения и устойчивости к колебаниям.
Интерфейс управления
Выбирайте интерфейсы в зависимости от сложности системы:
• PWM или Step/Dir → прямое управление двигателем
• SPI, UART, I²C, CAN → настройка, диагностика и сетевое управление.
Выбор интерфейса влияет на масштабируемость и интеграцию.
Интеграция обратной связи
Обеспечьте совместимость с системами обратной связи, такими как энкодеры, датчики тока или входы АЦП.Точная обратная связь поддерживает управление положением, регулирование крутящего момента и балансировку.
Расстояние связи и надежность
Для распределенных систем используйте стандарты связи, такие как CAN или
rs-485
rs-485
ATI
08+
In Stock: 80424 pcs
, для обеспечения больших расстояний и устойчивости к помехам.Интерфейсы ближнего действия, такие как I²C или SPI, подходят для компактных конструкций.
Энергоэффективность
Выбирайте микросхемы с эффективным переключением, низкими потерями проводимости и режимами энергосбережения.Это продлевает срок службы батареи и снижает тепловую нагрузку.
Тепловые характеристики и защита
Оцените способность рассеивания тепла, конструкцию корпуса и функции защиты, такие как отключение при перегреве, защиту от перегрузки по току и обнаружение неисправностей, чтобы обеспечить безопасную и непрерывную работу.
Выбор микросхем для управления двигателем робота-гуманоида требует сопоставления каждой функции системы с компонентами, которые обеспечивают требуемую производительность, точность и надежность.Каждый тип микросхемы выполняет определенную роль: от управления двигателями и определения движения до обеспечения связи и управления питанием.
Практический способ сопоставления функций управления двигателем с подходящими компонентами показан в таблице ниже, в которой обобщены часто используемые типы микросхем, примеры моделей и их преимущества для систем гуманоидных роботов.
Задача управления двигателем
|
Тип микросхемы
|
Примеры моделей
|
Ключевое преимущество
|
округ Колумбия
вождение автомобиля
|
H-мост
водитель
|
ДРВ8835
|
Компактный
двухмоторное управление
|
Степпер
движение
|
Степпер
водитель
|
ТМС2208
|
Гладкий
и тихое движение
|
Движение
обратная связь
|
ИДУ
датчик
|
LSM6DSOX
|
Точный
отслеживание баланса
|
Базовый
обнаружение движения
|
Акселерометр
|
ADXL345
|
Маломощный
обнаружение движения
|
МОЖЕТ
общение
|
МОЖЕТ
трансивер
|
СН65ХВД251
|
Надежный
сеть в реальном времени
|
Междугородняя
общение
|
rs-485
rs-485
ATI
08+
In Stock: 80424 pcs
трансивер
|
МАКС485
|
Стабильный
промышленная связь
|
В режиме реального времени
управление двигателем
|
МК/ЦСП
|
ТМС320F28379D
|
Высокоскоростной
ШИМ-обработка
|
Встроенный
контроль
|
MCU
|
я.MX
РТ1010
|
Быстро
контроль в реальном времени
|
Мощность
преобразование
|
постоянный ток/постоянный ток
преобразователь
|
ТПС5430
|
Эффективный
регулирование напряжения
|
Разработка электроники управления двигателем для роботов-гуманоидов требует тщательного выбора компонентов и правильной системной интеграции.Надежная работа зависит от соответствия электрическим ограничениям, обеспечения стабильной связи и поддержания постоянного управления.Когда эти факторы игнорируются, результатом часто становится нестабильное движение, снижение эффективности или отказ системы.Ниже приведены распространенные ошибки проектирования, наблюдаемые в системах управления двигателями.
1. Выбор драйвера с недостаточным выходным током
Использование драйвера двигателя, который не может поддерживать необходимый ток, приводит к перегреву, отключению или необратимому повреждению.Двигатели могут потреблять более высокий ток во время запуска и изменения нагрузки, поэтому важен правильный запас прочности.
2. Игнорирование тепловыделения
Неправильная тепловая конструкция, например плохой воздушный поток или отсутствие теплоотвода, приводит к чрезмерному повышению температуры.Даже правильно рассчитанные компоненты могут выйти из строя, если не будет эффективно контролироваться нагрев.
3. Использование неправильного интерфейса связи
Интерфейсы ближнего действия, такие как I²C или SPI, не подходят для работы на больших расстояниях или в шумных средах.Это может привести к ошибкам данных и нестабильному поведению системы.Для распределенных систем необходимы надежные методы связи.
4. Повторение функций датчика без необходимости
Добавление нескольких датчиков с перекрывающимися функциями увеличивает сложность системы, энергопотребление и вычислительную нагрузку без улучшения производительности управления.
5. Игнорирование требований к точному ответу
Управление двигателем зависит от быстрых и последовательных циклов обновления.Использование контроллеров, которые не могут поддерживать обработку точного времени, приводит к задержке реакции, снижению точности и нестабильности, особенно в задачах, чувствительных к стабильности.
6. Несовпадающие уровни напряжения.
Использование компонентов с несовместимыми диапазонами напряжения может привести к неэффективной работе или повреждению.Требуется правильное регулирование напряжения и согласование уровней во всех подсистемах.
Поделиться этим постом